MÁQUINAS Y MECANISMOS 3º
E.S.O.
1. TRANSMISIÓN LINEAL.
a) LA PALANCA
La
palanca es un barra rígida que gira alrededor de un eje situado en un punto de
apoyo.
La
relación entre la fuerza aplicada y la reacción obtenida sigue la siguiente ley:
F
x d = R x r (F por d es igual a R por
r)
F
es la fuerza ejercida
d
es la distancia de la fuerza al punto de apoyo
R
es la resistencia
r
es la distancia de la Resistencia al punto de apoyo
Si
el brazo motor es más largo que el brazo resistente, se consigue que la fuerza
sea menor que la resistencia.
Existen
tres clases de palancas, dependiendo de donde se encuentre situado el punto de
apoyo (eje) y donde se apliquen las fuerzas:
En
las palancas de primera clase, el punto de apoyo está situado entre el punto de
aplicación de la fuerza y la resistencia. Ejemplo: Alicates
En
las palancas de segunda clase, el punto de apoyo está situado en un extremo del
operador, y la fuerza se ejerce en el otro extremo. Ejemplo: Carretilla
En
las palancas de tercera clase, la resistencia y el punto de apoyo están en los
extremos de la palanca, y la fuerza se aplica en un punto de la misma. Ejemplo:
Pinzas
EJERCICIOS
1.Calcula
la fuerza que tenemos que hacer para mover una carga de 100 kg utilizando una
palanca de primer grado. Sabemos que la distancia de la carga al punto de apoyo
es 50 cm, la distancia de la potencia al punto de apoyo es 150 cm. (Sol: 33,3
kg)
F.d = R .r
100 . 50 = R . 150
Despejamos R =15000/50 = 33,3 Kg
F.d = R .r
100 . 50 = R . 150
Despejamos R =15000/50 = 33,3 Kg
2.
Calcula la fuerza que tenemos que hacer para mover un peso con una palanca de
primer grado. Sabemos que la distancia del peso al punto de apoyo es 70 cm, la
distancia entre la fuerza aplicada y el punto de apoyo es 140 cm y que la carga
a mover tiene una masa de 150 Kg. (Sol: 75 kg)
F .d = R .r
F . 140 = 150 . 70
Despejamos F = 150 . 70 /140 = 75 kg
F .d = R .r
F . 140 = 150 . 70
Despejamos F = 150 . 70 /140 = 75 kg
3.
Calcula la fuerza que tenemos que hacer para mover una carga C utilizando una
palanca de primer grado. Sabemos que la distancia entre la carga y el punto de
apoyo es 35 cm, la longitud del brazo de potencia es de 140 cm y que la masa
del peso a mover es de 150 Kg. (Sol: 37.5 kg)
F .d = R .r
F . 140 = 150 . 35
Despejamos F = 150.35/140 = 37,5 kg
F .d = R .r
F . 140 = 150 . 35
Despejamos F = 150.35/140 = 37,5 kg
4.
Calcula la fuerza que tenemos que hacer para mover una carga de 40 kg
utilizando una palanca de primer grado. Sabemos que la distancia entre la carga
y el punto de apoyo es 7 dm, la distancia de la fuerza al punto de apoyo es 30
cm. (Sol: 93,3 kg)
F .d = R .r
F . 30 = 40. 70
Despejamos F = 40.70/30 = 93,3 Kg
F .d = R .r
F . 30 = 40. 70
Despejamos F = 40.70/30 = 93,3 Kg
5.
Calcula la longitud del brazo de potencia para mover una carga de 120 Kg
aplicando una fuerza de 392 N. El brazo de carga tiene una longitud de 15 cm.
(Sol: 45 cm).
F . d = R . r
392 . d = 120 . 9,8 . 15
Despejamos d = 120 . 9,8 . 15/ 392 = 45 cm
F . d = R . r
392 . d = 120 . 9,8 . 15
Despejamos d = 120 . 9,8 . 15/ 392 = 45 cm
SISTEMA
DE POLEAS: una polea es una rueda con una ranura que gira alrededor de un eje
por la que se hace pasar una cuerda que permite vencer una resistencia R de
forma cómoda aplicando una fuerza F. De este modo podemos elevar pesos hasta
cierta altura. Es un sistema de transmisión lineal pues el movimiento de
entrada y salida es lineal.
b) POLEA FIJA: Consta de una sola polea. La fuerza que debemos ejercer es igual a la
resistencia que queremos vencer.
 F = R
F = R
c) POLEA MÓVIL: Consta de dos poleas una móvil y otra fija. En una polea móvil la fuerza
que tengo que hacer para vencer la resistencia se reduce a la mitad.

6. Un niño que pesa 12 kg se coloca en un balancín a 0,5 m del punto de apoyo ¿Cuánto pesa el otro niño si se coloca a 0,25 m para que el balancín esté en equilibrio?
F . d = R . r
12 . 0,5 = R . 0,25
R = 12 . 0,5/0,25 R = 24 kg
F . d = R . r
12 . 0,5 = R . 0,25
R = 12 . 0,5/0,25 R = 24 kg
7. Dispongo de una palanca de 1,5m debo elevar cajas de 75 kg y no puedo ejercer más de 15 kg de fuerza, ¿Dónde debo colocar el punto de apoyo?
F . d = R . r
15 . x = 75 . (1,5 - x)
15x = 112,5 - 75x
90x = 112,5 x= 112,5/90 x = 1,25 m
La distancia de la fuerza al punto de apoyo es 1,25 m y la distancia de las cajas al punto de apoyo es 0,25 m
8. Dos niños de 20 y 26 kg juegan en un balancín que mide 3m, ¿a qué distancia del punto de apoyo se deben colocar cada uno para obtener el equilibrio?
F . d = R . r
20 .x = 26 . (3 - x)
20x = 78 - 26x
46x = 78 x = 78/46 x = 1,695 m 3 - 1,695 = 1,305 m
A 1, 695 m el niño que pesa 20 kg y a 1,305 m el niño que pesa 26 Kg
9.Indica la clase de palanca de los siguientes elementos y explica porqué:
pinzas para tender, caña de pescar, cascanueces, tijeras, pinzas de hielo y tenazas.
Primer grado: Pinzas de tender, tijeras y tenazas porque el punto de apoyo está entra la fuerza y la resistencia.
Segundo grado: cascanueces porque la resistencia se encuentra entre el punto de apoyo y la fuerza.
Tercer grado: caña de pescar y pinzas de hielo porque la fuerza se sitúa entre el punto de apoyo y la resistencia.
Primer grado: Pinzas de tender, tijeras y tenazas porque el punto de apoyo está entra la fuerza y la resistencia.
Segundo grado: cascanueces porque la resistencia se encuentra entre el punto de apoyo y la fuerza.
Tercer grado: caña de pescar y pinzas de hielo porque la fuerza se sitúa entre el punto de apoyo y la resistencia.
 F = R/2 F = 120/2 = 60N
F = R/2 F = 120/2 = 60N2.TRANSMISIÓN CIRCULAR
a) RUEDAS DE FRICCIÓN
Las ruedas de fricción consisten en dos ruedas que se encuentran en contacto y que giran en torno a un eje. Una de ellas gira gracias a una manivela o a un motor y trasmite su giro a la otra, sólo que el giro de una siempre es en el sentido contrario al de la otra.

b) POLEAS CON CORREA
Cuando queremos transmitir el movimiento a un eje que está alejado de otro utilizaremos este tipo de transmisión, consiste en dos ruedas acanaladas unidas mediante una correa que suele ser de caucho o de plástico especial. Debemos observar que en este último mecanismo las dos ruedas giran en el mismo sentido. Sólo si la correa se cruza, el sentido de giro de las poleas se invierte.

N1 . D1 = N2 . D2
siendo:
- N1 la velocidad en rpm( revoluciones por minuto) de la polea motriz llamada también conductora o polea de entrada
- N2 la velocidad en rpm( revoluciones por minuto) de la polea conducida llamada también polea de salida.
- D1 es el diámetro de la polea motriz.
- D2 es el diámetro de la polea conducida
Relación de transmisión:
Rt =D1/D2
Si Rt es mayor de 1 se trata de un mecanismo multiplicador de velocidad.
Si Rt es menor de 1 se trata de un mecanismo reductor de velocidad
Son dos ruedas dentadas cuyos dientes se ajustan completamente (engranan) y permiten que al girar una de ellas la otra gire en el sentido contrario. La ventaja de los engranajes es que nunca patinan puesto que la transmisión es a través de los dientes.

N1 . Z1 = N2 . Z2
siendo:
- N1 la velocidad en rpm (revoluciones por minuto) de la polea motriz llamada también conductora o polea de entrada
- N2 la velocidad en rpm (revoluciones por minuto) de la polea conducida llamada también polea de salida.
- Z1 es el número de dientes de la rueda motriz.
- Z2 es el número de dientes de la rueda conducida
Relación de transmisión:
Rt =Z1/Z2
Si Rt es mayor de 1 se trata de un mecanismo multiplicador de velocidad.
Si Rt es menor de 1 se trata de un mecanismo reductor de velocidad
d) ENGRANAJES CON CADENA
Consiste en dos ruedas dentadas unidas por una cadena. Las dos ruedas dentadas giran en el mismo sentido.

1.Indica hacia donde gira cada rueda dentada con un flecha.

2. En un sistema de poleas simple, la polea conectada al eje del motor tiene un diámetro de 8 mm y la conducida un diámetro de 12 cm. Cuando se pone en marcha el motor se cuenta media vuelta por segundo en la polea conducida. Calcula el número de revoluciones por minuto del motor. (Sol:450 rpm)
3. Calcula la velocidad de la polea conducida de un sistema de poleas en el que el diámetro de la polea motriz es 12 cm y su velocidad 400 rpm, siendo el diámetro de la polea conducida 4 cm. (Sol:1200 rpm)
4.Calcula la relación de transmisión del sistema anterior. Indica si es reductor o multiplicador. Dibuja el sistema. (Sol: 3)
e)TORNILLO SINFÍN :
Se trata de un tornillo que se engrana a una rueda dentada, cuyo eje es perpendicular al eje del tornillo. Por cada vuelta del tornillo sinfín acoplado al eje motriz, la rueda dentada acoplada al eje de arrastre gira un diente. Este sistema tiene una relación de transmisión muy baja, es decir, es un excelente reductor de velocidad. El elemento motriz es el tornillo, nunca al revés, el sistema no es reversible.
La relación de transmisión en este sistema es: Rt = 1 / Z siendo Z el número de dientes de la rueda.

3. MECANISMOS DE TRANSFORMACIÓN DE MOVIMIENTO
Este tipo de mecanismos transforman un movimiento circular en uno lineal, o a la inversa. Pueden ser de dos tipos: a) Mecanismos de transformación circular en lineal . b) Mecanismos de transformación circular en lineal alternativo.
3.1 MECANISMOS DE TRANSFORMACIÓN CIRCULAR EN LINEAL: el elemento de entrada tiene movimiento circular, mientras que el elemento de salida tiene movimiento lineal, o a la inversa.
a) TORNO MANIVELA
3.1 MECANISMOS DE TRANSFORMACIÓN CIRCULAR EN LINEAL: el elemento de entrada tiene movimiento circular, mientras que el elemento de salida tiene movimiento lineal, o a la inversa.
a) TORNO MANIVELA
Es un cilindro que consta de una manivela que lo hace girar, de forma que es capaz de levantar pesos con menos esfuerzo. Se puede considerar como una palanca de primer grado cuyos brazos giran 360º. Observa el dibujo y comprenderás: Con la mano giramos la manivela aplicando una fuerza F, el torno gira y la cuerda se enrolla en el cilindro a la vez que eleva la carga. Es una palanca cuyo punto de apoyo es el eje del cilindro, el brazo de la fuerza d es la manivela y el brazo de la resistencia r es el radio del cilindro.
F·d = R·r

b) PIÑÓN-CREMALLERA
Este sistema transforma el movimiento circular en rectilíneo por medio de dos elementos dentados: Un piñón que gira sobre su propio eje y una barra dentada denominada cremallera. Los dientes pueden ser rectos o helicoidales. Cuando la rueda dentada gira, la cremallera se desplaza con movimiento rectilíneo, se trata de un mecanismo reversible. Se utiliza en columnas de taladradoras, sacacorchos, direcciones de automóviles, etc.

c)TORNILLO-TUERCA
Este sistema sirve como elemento de unión entre dos o más piezas. Pero, además posee unas características que le permiten que se pueda utilizar para transmitir el movimiento. Se compone de una varilla roscada y una pieza con un agujero roscado de la misma métrica o medida. Al girar la varilla, permaneciendo fija la tuerca, hace que esta última se desplace en sentido longitudinal del eje, con lo que se consigue transformar un movimiento circular uniforme en otro lineal. También se trata de un mecanismo reversible. Un parámetro clave en este sistema es el paso, que es la distancia en milímetros entre vuelta y vuelta.

Calcula la velocidad a la que gira dicha rueda y la relación de transmisión del sistema.
(SOL: 50rpm, 1/30)
6. Disponemos de un torno y queremos subir un cubo. Si el cubo pesa 100 N, ¿qué fuerza mínima deberemos aplicar para izarlo? (Datos: radio del tambor = 16 cm y longitud de la manivela = 0,4 m) .
(SOL: 40N)3.2 MECANISMOS DE TRANSFORMACIÓN CIRCULAR EN LINEAL ALTERNATIVO: el elemento de entrada tiene movimiento circular, mientras que el elemento de salida tiene movimiento lineal alternativo, o a la inversa.
a) SISTEMA BIELA-MANIVELA
Está formado por una manivela y una barra denominada biela. Ésta se encuentra articulada por un extremo con dicha manivela (el punto B) y, por el otro, con un elemento que describe un movimiento alternativo (el punto C). Al girar la rueda, la manivela AB transmite un movimiento circular a la biela BC que experimenta un movimiento de vaivén. Este sistema también funciona a la inversa, es decir, transforma un movimiento rectilíneo alternativo de vaivén en un movimiento de rotación. Su importancia fue decisiva en el desarrollo de la locomotora de vapor, y en la actualidad se utiliza en motores de combustión interna, limpiaparabrisas, máquinas herramientas, etc.

VÍDEO BIELA MANIVELA
b) CIGÜEÑAL
Es un sistema compuesto por la unión de múltiples manivelas en un mismo eje acopladas a sus correspondientes bielas. Transforma un movimiento circular en los movimientos alternativos de vaivén desacompasados de las diferentes bielas. También puede transformar los movimientos de vaivén desacompasados de las diferentes bielas en un movimiento circular. Los cigüeñales son empleados en todo tipo de mecanismos que precisen movimientos alternativos sincronizados como por ejemplo los motores de los coches.

c) EXCÉNTRICA
Es una rueda que tiene una barra rígida unida en un punto de su perímetro. Su eje de giro no coincide con su eje geométrico, por lo que transforma el movimiento circular en rectilíneo alternativo.
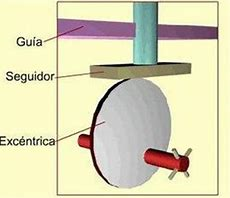
d) LEVA
Se compone de una leva (rueda con un saliente) y un seguidor que está permanentemente en contacto con la leva gracias a la acción de un muelle..
La leva recibe el movimiento rotativo a través del eje motriz, de este modo, el giro del eje hace que el perfil o contorno de la leva toque, mueva o empuje al seguidor.

No hay comentarios:
Publicar un comentario